Experimental set-up: ultrasonic distance sensors and webcam for LEGO block identification
Project Overview
This project developed a system to identify LEGO blocks based on geometric and visual data, with
the potential application of sorting LEGO bricks automatically. The system combines two independent
sensing approaches:
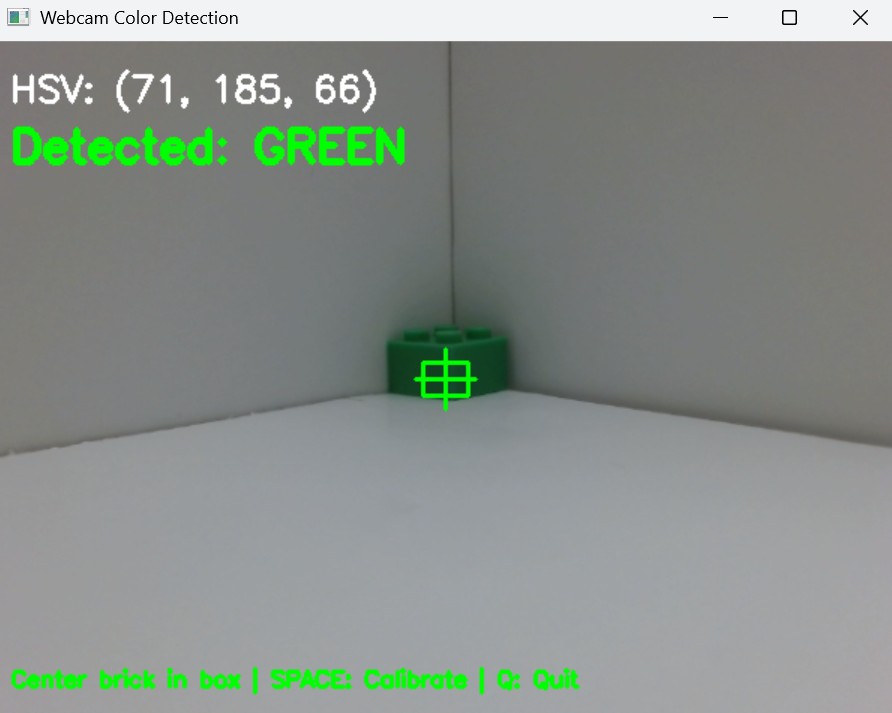
Web camera + Python: Capture images and extract color information using HSV-based color detection
Error analysis was performed for each measurement method to assess the capabilities and limitations of the system.
Sensor Selections
Sensor
Quantity
Manufacturer
Make / Model
Sensitivity
Ultrasonic Distance Sensor
2
Adafruit
4007
±0.5 cm
Ultrasonic Distance Sensor
1
Adafruit
HC-SR04
±0.5 cm
Web Camera
1
Logitech
C920s Pro HD Webcam
—
All three distance sensors were interfaced via a single Arduino Uno for power and data acquisition
The web camera was combined with a custom Python script for color identification
Equipment List
Equipment
Quantity
Availability
Cost
Distance Sensor (Adafruit 4007)
2
In lab
$3.95 / sensor
Distance Sensor (HC-SR04)
1
In lab
$3.95
Web Camera (Logitech C920s)
1
From group member
$54.99
Arduino
1
In lab
$19.99
Wire
1 ft
In lab
$5.00 (approx.)
Small Breadboard
3
In lab
$4.95
Poster Board
1
From group member
$5.00 (approx.)
Tape
8 in
In lab
$2.00
LEGOs (various sizes)
20 pieces
From group member
$50.00 (approx.)
Ruler
1
In lab
$4.50
Total
$162.19 (approx.)
Color Recognition
Calibration
Before detection, the system is calibrated to build a dictionary of color ranges for accurate color
classification. This calibration process is run once (or whenever new colors need to be added):
Center a LEGO block within the defined detection region on screen
The script samples and outputs HSV pixel data from the detection box
The user inputs the corresponding color label
The script appends or replaces the HSV range and label in the color database
Detection Process
A custom Python script identifies each LEGO block's color in real time using the Logitech C920s webcam:
LEGO piece is placed within the camera's field of view
Script converts the image from BGR to HSV color space
Measured HSV values are compared to the saved color dictionary
The detected color label is output to the user
The script supports both vibrant colors (red, yellow, green, blue) and neutral colors (black, white,
gray, brown). A secondary window displays the full color dictionary with HSV ranges, updated in real time.
Tolerance values used: Hue ±3, Saturation ±15, Value ±3.
Distance Measurements
Calibration
Sensors are calibrated using an Arduino sketch run while the measurement area is empty of LEGOs:
Sensors collect data for 5 seconds in each direction (X, Y, Z)
Data is averaged to produce the nominal distance to the wall in each direction
These nominal values are entered into the measurement script as reference baselines
Measurement Process
Ultrasonic sensors determine LEGO geometry by emitting and receiving sound pulses:
LEGO block is placed within the sensing range of all three sensors
Sensors fire a few milliseconds apart to avoid signal interference between them
For 10 seconds, each sensor records its distance to the LEGO block
Measured distances are subtracted from the nominal (empty-area) distance
Final dimensions are obtained by averaging the X, Y, and Z measurements
Final dimensions are recorded in Excel for analysis
Experimental Results
A sample of five LEGO blocks was measured using the test and calibration procedures. Percent and
RMS errors were calculated for each block.
Average Length Error23.24%
Average Width Error16.19%
Average Height Error113.65%
Global RMS Error116.33%
Color Detection Accuracy100%
In general, average absolute geometric error was high, indicating issues with sensor placement,
set-up design, or signal interference — particularly for height measurements. Color detection
accuracy was 100%, demonstrating that the Python/OpenCV-based approach is highly reliable for this task.
Design of Experiments
Research Question: How does lighting, background color, and camera quality affect
how the camera reads the LEGO brick color?
Lighting: Dim (300 lumens) vs. Bright (1,500–2,000 lumens)
Background Color: White vs. Black
Camera Quality: Low (320×240) vs. High (1920×1080)
Run
Lighting
Background
Camera Quality
1
Dim
White
Low
2
Bright
White
Low
3
Dim
Black
Low
4
Bright
Black
Low
5
Dim
White
High
6
Bright
White
High
7
Dim
Black
High
8
Bright
Black
High
Experimental Strengths
Simple, Low-Cost Set-Up: Uses readily available components (ultrasonic sensors, Arduino, webcam) that are easy to assemble and modify
Non-Contact Measurements: Ultrasonic distance sensors measure geometry without touching the block, reducing wear and alignment issues
Easy Calibration: The color recognition script can easily be updated to include new LEGO colors; distance calibration uses simple offsets
Modular Architecture: Color detection and geometry measurement operate independently using different sensors, so components can be replaced without impacting the rest of the system
Experimental Limitations
Geometric Constraints: System is optimized for rectangular or square blocks; irregular shapes may cause incorrect geometry classification
Color Detection Sensitivity: Webcam performance depends heavily on lighting conditions; neutral colors (black, white, gray) are difficult to distinguish reliably under poor lighting
Possible Sensor Interference: Ultrasonic sensors can interfere with each other when placed close together; echoes bouncing off walls may cause inaccurate readings even with small firing delays
Surface Material and Orientation Effects: Distance sensors perform poorly with angled or irregular surfaces; LEGO studs on top surfaces can introduce height measurement errors
Future Improvements
Additional Classification Parameters: Incorporate weight, number of studs, or surface texture to improve geometric classification
Improved Lighting: Add dedicated LED lighting around the camera to reduce color recognition errors under variable ambient conditions
Automated Testing: LEGO bricks are currently placed by hand; automation (e.g., a feed ramp) would improve throughput and repeatability
More Robust Geometric Sensing: Replace ultrasonic sensors with infrared or laser distance sensors for higher accuracy at short ranges
Sensor Filtering: Apply digital filters (e.g., moving average, Kalman) to reduce noise and improve geometric measurement accuracy
Machine Learning Classification: Replace HSV thresholding with a trained classifier for more robust performance across lighting conditions and brick colors
Technologies Used
Python / OpenCV: Real-time color detection using HSV color space, calibration workflow, and dictionary-based classification
Arduino Uno: Data acquisition and timing control for three ultrasonic distance sensors