Academic Sponsor: Dr. Ian Sigal - UPMC Laboratory of Ocular Biomechanics
Team Members: Karan Choudhari (Coordinator), James Puzon (Planner), Logan Radomicki (Resource Manager), Lowell Shaw (Resource Manager), Max Mongiello (Presenter)
Project Overview
This senior capstone project focuses on developing a robot-assisted system for constructing three-dimensional
fibrous structures. The project addresses a critical need in ocular biomechanics research by creating physical
models that simulate the complex fiber-fiber interactions found in the human eye. This work has direct applications
in glaucoma research and the development of improved medical textiles, such as surgical meshes for hernia and
pelvic prolapse repair.
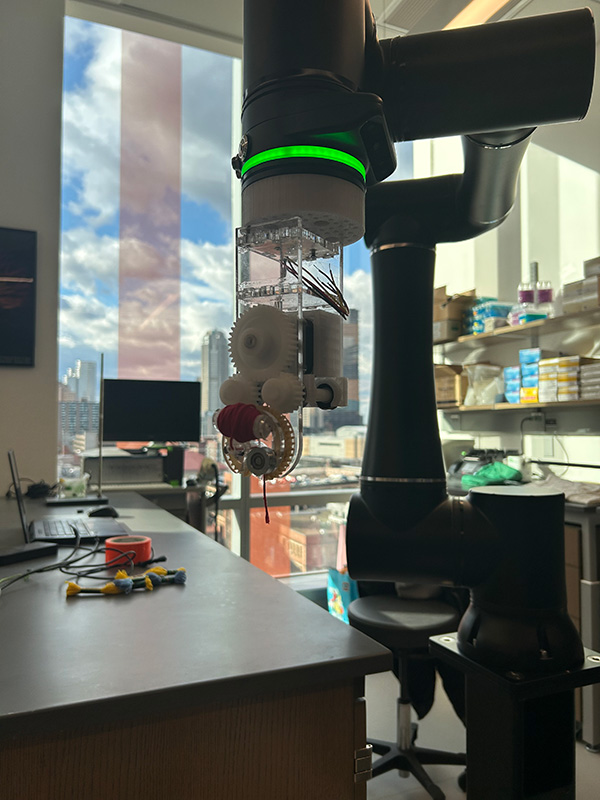
Our team was tasked with adapting a Standard Bots RO1 robotic arm to precisely manipulate and weave fibers in
three-dimensional space. The project builds upon previous work by Dr. Sigal's lab and represents a significant
advancement in the physical simulation of ocular biomechanics.
Custom-designed end effector for fiber manipulation and weaving
Project Objectives
Successfully program the new Standard Bots RO1 robot arm to replicate structures created by previous teams
Design and implement a custom end effector capable of dispensing fiber under tension
Develop a weaving mechanism to enable the creation of complex 3D fiber structures
Create a start/stop function to minimize human intervention during operation
Build demonstration structures that showcase the robot's capabilities
Achieve a success rate greater than 70% in reliably reproducing fiber structures
Design Process and Key Milestones
Milestone I: Project Planning and Initial Design
The first milestone focused on understanding the project requirements and developing a comprehensive plan.
Key activities included:
Requirements Analysis: Working closely with Dr. Sigal to identify user needs and establish
clear objectives for the robot system
Initial Concepts: Using ideation techniques from mechanical design coursework to develop
multiple design approaches
Resource Planning: Identifying necessary equipment, materials, and support from the
Swanson Center for Product Innovation and Pitt Makerspace
Budget Management: Maintaining project costs under $100, well below the $250 departmental standard
Milestone II: Design Concepts and Selection
The second milestone involved developing and evaluating three distinct design concepts for the end effector:
Concept 1: Compliant Mechanism
Simple, passive design using mechanical compliance to secure fiber starting and ending points
Advantages: No electronics, low cost, simple programming
Challenges: Cannot address weaving functionality, requires human assembly
Concept 2: Weaving End Effector (Adopted)
Active design using gears and a stepper motor to enable on-demand fiber dispensing and weaving
Advantages: Full weaving capability, well-understood mechanisms, maintains fiber tension
Challenges: Requires mechatronics integration, more complex programming, higher cost
Concept 3: Magnetic Carriage
Passive design using magnetic attachments for fiber manipulation
Advantages: Potentially faster than motorized options, no additional programming needed
After conducting a Pugh chart analysis and incorporating feedback from peer reviews and our sponsor, we selected
a combination of the Weaving End Effector and Compliant Mechanism designs to
achieve both weaving capability and start/stop functionality.
Milestone III: Validation and Final Deliverables
The final milestone focused on building, testing, and validating our designs:
Final End Effector Design:
Successfully designed a gear-based system capable of dispensing and weaving fiber on demand
Integrated a stepper motor drive system for precise control
Applied stress analysis using Lewis' equation, achieving a factor of safety greater than 10 for gear teeth
Conducted practical testing under realistic motor loading conditions
Compliant Clips for Start/Stop:
Designed clips capable of securing fiber in place
Identified areas for future improvement, including clip width and force requirements
3D Fiber Structures:
Successfully programmed the robot arm to create three-dimensional fiber structures
Demonstrated fiber-laying capabilities to the project sponsor
Technical Challenges and Solutions
Motor Torque: The initially selected stepper motor did not provide sufficient torque to rotate
the gears. Testing with a function generator confirmed mechanical viability; future iterations will require a
higher-torque motor.
Robot Interface: The proprietary software for the Standard Bots RO1 had limitations. We recommend
future teams use an API that supports forward and inverse kinematics for enhanced programming flexibility.
Clip Design: The compliant clips were too narrow for easy fiber insertion, requiring design
refinement for future iterations.
Fiber Tension: Maintaining consistent fiber tension throughout the weaving process required
careful design of the dispensing mechanism and material selection for contact surfaces.
Video Demonstrations
The following videos showcase key capabilities of our robotic fiber manipulation system:
End Effector Yarn Wrapping
Video showing the end effector wrapping yarn around nails
Motor-Driven End Effector Rotation
Video demonstrating the end effector being turned by the motor when it receives voltage
Project Outcomes and Impact
Technical Achievement:
Despite challenges with motor torque and software limitations, our sponsor considers this project successful.
We achieved the minimum goal of building 3D structures with the new robot arm and end effector, and we successfully
designed a mechanically viable weaving system—one of the two challenge goals set at the project's outset.
Community Impact:
Immediate Benefit: Dr. Sigal's Ocular Biomechanics Lab gains a new tool for physical simulation
of fiber mechanics in the eye, opening new research avenues in glaucoma treatment
Broader Applications: The techniques developed can contribute to improved surgical meshes and
other medical textiles, potentially improving patient outcomes and quality of life
Future Research: The project establishes a foundation for continued development of robotic
systems for precise fiber manipulation in medical and research applications
Educational Value:
This project provided invaluable experience in developing novel solutions without existing commercial or research
precedents. Key skills developed include:
Robotic system programming and control
Mechanical design using CAD (SolidWorks)
Mechatronics integration and troubleshooting
Stress analysis and materials selection
Team collaboration and project management
Adaptability in the face of technical challenges
Communication with sponsors and stakeholders
Technologies and Methodologies Used
Robotics: Standard Bots RO1 robotic arm with custom end effector mounting
CAD Design: SolidWorks for 3D modeling and assembly design
Manufacturing: FDM 3D printing for rapid prototyping